Des produits
AGV - véhicule guidé automatisé
AGV Lurking à protection complète haute performance



Le Robot mobile latent La série déplace les étagères ou les palettes d'inventaire vers la station de prélèvement grâce à son mécanisme de levage. Il optimise les performances de mouvement et améliore la protection de la sécurité, offrant ainsi des solutions de marchandises à personne hautement productives et rentables.
Pour le chiffre d'affaires en entrepôt ou la liaison entre la ligne de production et l'entrepôt, l'AGV de manutention flexible est sélectionné pour remplacer le chariot élévateur traditionnel et autres outils de manutention en fonction de la demande de flux. Kingmore forme intelligente l'interaction des informations entre le système de manutention, l'entrepôt et la ligne de production, ce qui peut assurer la traçabilité des informations dans l'ensemble du lien, créer une production flexible et intelligente et réduire la demande d'utilisation manuelle.
1. Type d'ascenseur
Le robot de levage est un équipement logistique automatisé qui peut réaliser un chargement, un levage et un transport autonomes. Il se caractérise par le fait qu'il est équipé d'un dispositif de levage, capable de soulever des marchandises du sol vers une position plus élevée pour accomplir des tâches telles que la manutention et le stockage. Habituellement utilisé dans les applications logistiques industrielles et d’entreposage, il peut améliorer efficacement l’efficacité de la production et réduire les coûts logistiques.
Q2-400D | Hauteur de levage (mm) | 60 |
| Charge spécifiée (kg) | 400 | |
| Navigation | Code QR/LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 820 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 780*545*300 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 93 | |
| Précision de positionnement (mm,°) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q3-600D | Hauteur de levage (mm) | 60 |
| Charge spécifiée (kg) | 600 | |
| Navigation | Code QR/LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 995 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 950*650*250 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 132 | |
| Précision de positionnement (mm,°) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q7-1000E | Hauteur de levage (mm) | 60 |
| Charge spécifiée (kg) | 1000 | |
| Navigation | Code QR/LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 1200 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 1150*820*254 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 172 | |
| Précision de positionnement (mm, °) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q8-2000A | Hauteur de levage (mm) | 100 |
| Charge spécifiée (kg) | 2000 | |
| Navigation | Code QR/LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 1780 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 1523*1150*327 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 0,9 | |
| Poids (kg) | 550 | |
| Précision de positionnement (mm,°) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
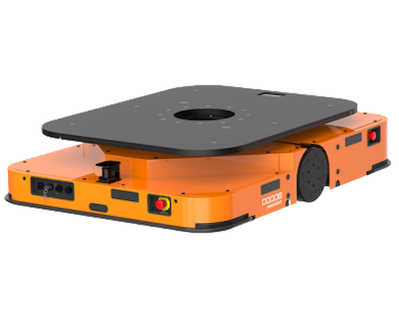
2. Type de châssis
Le véhicule à châssis robot latent est une plate-forme robotique dotée de fonctions d'extension de couche supérieure et de capacités de mobilité de châssis. Sa caractéristique est que la table possède ses propres trous de montage supérieurs et qu'une carte d'interface intégrée est fournie pour que le mécanisme supérieur obtienne des interfaces matérielles ; il peut s'adapter à une variété de besoins d'expansion supérieurs, tels que les rouleaux, les petits bras robotiques, les caméras d'inspection, les équipements de détection environnementale, etc., et possède des fonctions riches. Les capacités de développement et d'expansion secondaires peuvent être largement utilisées dans divers secteurs industriels, d'entreposage et de logistique, fabrication intelligente et autres scénarios.
Q3B-600C-D | Hauteur de levage (mm) | / |
| Charge spécifiée (kg) | 600 | |
| Navigation | Code QR | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 995 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 950*650*300 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 126 | |
| Précision de positionnement (mm, °) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q3B-600L-D | Hauteur de levage (mm) | / |
| Charge spécifiée (kg) | 600 | |
| Navigation | LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 995 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 950*650*300 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 126 | |
| Précision de positionnement (mm, °) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q7B-1000C-E | Hauteur de levage (mm) | / |
| Charge spécifiée (kg) | 1000 | |
| Navigation | Code QR | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 1200 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 1150*820*300 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 184 | |
| Précision de positionnement (mm,°) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
Q7B-1000L-E | Hauteur de levage (mm) | / |
| Charge spécifiée (kg) | 1000 | |
| Navigation | LSLAM | |
| Capacité de pente(°) | 3 | |
| Diamètre de rotation (mm) | 1200 | |
| Durée de fonctionnement nominale (h) | 8 | |
| DimensionsL*L*H(mm) | 1150*820*300 | |
| Vitesse de fonctionnement nominale (sans charge) (m/s) | 2.0 | |
| Poids (kg) | 184 | |
| Précision de positionnement (mm,°) | ±10/±1 | |
| Temps de charge (h) | ≤1,5 | |
| Mode conduite | entraînement différentiel |
CARACTÉRISTIQUES DE Chariot élévateur AGV
Applications




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
Continuez à lire, restez informé, abonnez-vous et nous vous invitons à nous dire ce que vous en pensez.



droits d'auteur
2026@ Jiangsu Kingmore Storage Equipment Manufacturing Co., Ltd Tous les droits sont réservés.
Plan du site
| Blog
| Xml
| politique de confidentialité
 RÉSEAU PRIS EN CHARGE
RÉSEAU PRIS EN CHARGE
 français
français English
English español
español 日本語
日本語 한국의
한국의 Deutsch
Deutsch العربية
العربية português
português 中文
中文 русский
русский